
การต่อสายไฟของ Step Motor แบบต่างๆ
เริ่มต้นก่อนเลยคือข้อดีของ step motor คือ ให้ทอร์คค่อนข้างสูงและมีการสั่งงานเป็นสเต็ปทำให้มีความแม่นยำสูงจึงทำให้เป็นที่นิยมอย่างมาก ข้อเสียคือ ในการควบคุมทำได้ยากการต่อสายไฟก็ทำได้ยากกว่า DC Motor ธรรมดามาก ในการต่อสายไฟของสเต็ปมอเตอร์นั้นทำได้หลายรูปแล้วแปลงกลับไปมาได้ โดยจำนวนสายมากสุดที่พบจะเป็นแบบ 8 สาย และจำนวนสายที่พบน้อยสุดคือ 4 สาย ในการใช้งานมีการต่อสายไฟกับบอร์ดขับสเต็ปมอเตอร์ตั้งแต่ 8 สาย, 6 สาย, 5 สาย, 4 สาย ซึ่งในบทความนี้จะแสดงวิธีการต่อสายแบบต่างๆกัน โดยมีการต่อแบบต่างๆ เป็นดังนี้
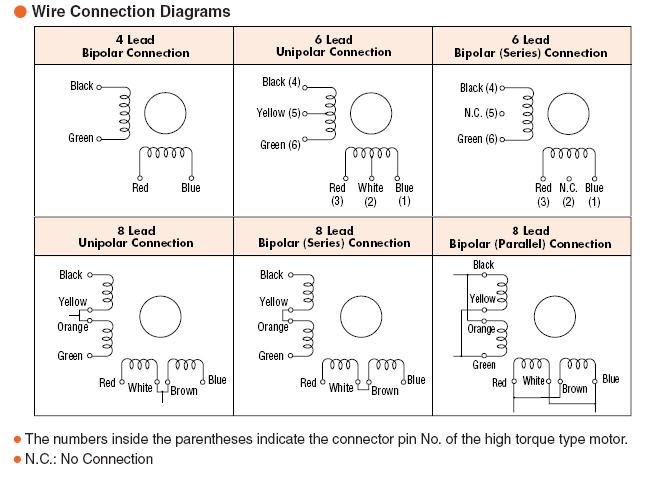
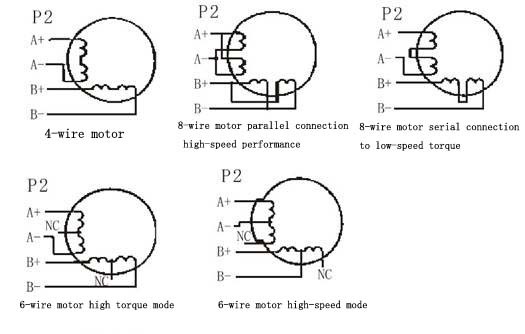
ข้อดีของการต่อแต่ละแบบจะเป็นลักษณะของการได้ความเร็วสูงหรือได้ทอร์คสูง ดังรูปด้านล่าง
หลายคนอาจจะสงสัยว่าแล้วการต่อแต่ละแบบแต่ละยี่ห้อสีของสายไฟจะเหมือนกันหรือไม่ เราจึงมีวิธีการหาคู่สายไฟมาให้ดูกันซึ่ง สามารถใช้ Multi-Meter ก็ได้หรือใช้หลอด LED ก็ทำได้เช่นกัน
ส่วนใครต้องการรายละเอียดที่มากขึ้นดูได้จากด้านล่างนี้เลยครับ
ในอดีตมีการแบ่งชนิดของสเต็ปเปอร์มอเตอร์ตามลักษณะโครงสร้างซึ่งแบ่งได้เป็น 3 ชนิดคือ แบบแม่เหล็กถาวรหรือ PM (Permanent Magnet), แบบปรับค่าความต้านทานแม่เหล็กได้หรือ VR (Variable Reluctance) และแบบผสมหรือไฮบริด (Hybrid) ซึ่งเป็นการผสมกันระหว่างแบบ PM และ VR ในปัจจุบันนี้สเต็ปเปอร์มอเตอร์ส่วนใหญ่เป็นแบบไฮบริด เนื่องจากสามารถทำให้มีความละเอียดในการเคลื่อนที่ของแกนได้สูงถึง 0.9 องศาต่อสเต็ป (ซึ่งเป็นข้อดีของแบบ VR) และให้แรงบิดหรือทอร์กที่สูง โดยใช้พลังงานต่ำ (เป็นข้อดีของแบบ PM) ในรูปที่ 1 แสดงโครงสร้างอย่างง่ายของสเต็ปเปอร์มอเตอร์แบบไฮบริด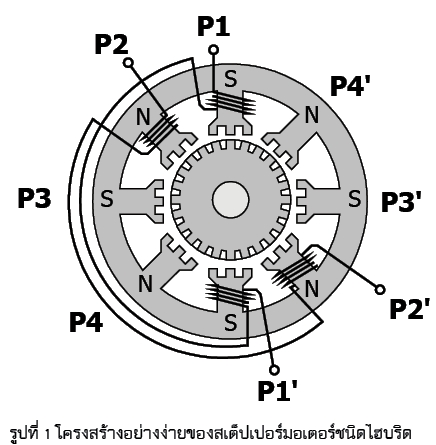
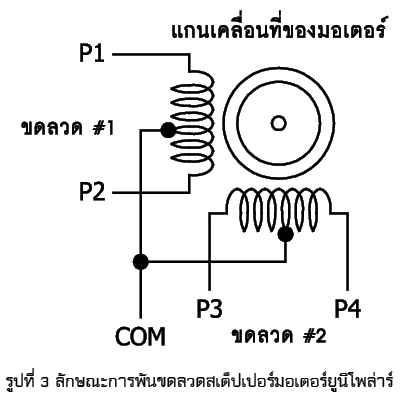
ในการกำหนดชนิดของสเต็ปเปอร์มอเตอร์ในยุคต่อมาจนถึงปัจจุบันจึงพิจารณาที่ลักษณะของการพันขดลวด, การต่อสายออกมาใช้งาน และวงจรขับ ซึ่งแบ่งเป็น 2 ชนิดหลักๆ คือ ชนิดไบโพลาร์ (bipolar) และชนิดยูนิโพลาร์ (uni-polar)
มีลักษณะการพันขดลวดของมอเตอร์แสดงในรูปที่ 2 แบ่งออกเป็น 2 ขดที่ไม่มีแท็ปกลาง ทำให้บางครั้งจึงเรียกสเต็ปเปอร์มอเตอร์แบบนี้ว่า เป็นสเต็ปเปอร์มอเตอร์แบบ 2 เฟส การขับให้มอเตอร์แบบนี้หมุนจะต้องป้อนแรงดันต่างขั้วกันให้แก่ขดลวดแต่ละขด ทำให้วงจรขับสเต็ปเปอร์มอเตอร์แบบนี้ค่อนข้างซับซ้อน

เพื่อให้การเลือกใช้งานสเต็ปเปอร์มอเตอร์เป็นสากลจึงได้มีการกำหนดมาตรฐานขนาดของสเต็ปเปอร์มอเตอร์ขึ้น ภายใต้ข้อตกลงร่วมกันของสมาคมผู้ผลิตชิ้นส่วนทางไฟฟ้าแห่งชาติหรือ NEMA (National Electrical Manufacturer’s Assocation) ได้ทำการกำหนดขนาดมาตรฐานของสเต็ปเปอร์มอเตอร์ออกมา โดยแบ่งตามลักษณะรูปร่างของสเต็ปเปอร์มอเตอร์ดังนี้



การกระตุ้นและควบคุมการหมุนของมอเตอร์ให้เคลื่อนที่ไปแต่ละสเต็ปทำได้โดยจ่ายกำลังไฟฟ้าไปยังขดลวดแต่ละขดบนสเตเตอร์ ซึ่งต้องป้อนเป็นแบบซีเควนเชียลในรูปแบบที่ถูกต้องด้วย สามารถแบ่งได้เป็น 3 รูปแบบคือ แบบเวฟ (wave) หรือแบบฟูลเต็ป 1 เฟส (full step 1-phase), แบบฟูลสเต็ป 2 เฟส และแบบครึ่งสเต็ป (half step)
เป็นรูปแบบที่ผสมผสานระหว่างการกระตุ้นแบบฟูลสเต็ป 1 และ 2 เฟส เพื่อเพิ่มจำนวน ของสเต็ปต่อรอบอีกเท่าตัวหนึ่ง ในระบบนี้จะกระตุ้นขดลวดเรียงกันไปเป็นลำดับดังนี้ เริ่มจากขดลวดที่ 1, 1 และ 2, 2, 2 และ 3, 3, 3 และ 4, 4, 4 และ 1 แล้ววนกลับมายังขดลวดที่ 1
แรงบิดที่ได้จากการกระตุ้นแบบนี้จะเพิ่มมากขึ้นอีก เพราะช่วงสเต็ปมีระยะสั้นลง แต่ละสเต็ปเกิดแรงดึงจากขดลวด 2 ขดที่ถูกกระตุ้นพร้อมกัน ความถูกต้องของตำแหน่งมีเพิ่มมากขึ้น แต่ต้องพึงระวังไว้อีกประการหนึ่งว่าเมื่อกระตุ้นให้ทำงานในรูปแบบนี้จะต้องทำการหมุนถึง 2 สเต็ป จึงจะได้เท่ากับระยะเท่ากับ 1 สเต็ปเต็มของการควบคุมใน 2 แบบแรก สำหรับแหล่งจ่ายกำลังไฟฟ้าต้องใช้ขนาดเท่ากับแบบ 2 เฟสเป็นอย่างน้อย จึงจะเพียงพอ ขั้นตอนการทำงานต่างๆ แสดงดังในตารางที่ 3

เป็นการกระตุ้นที่มีรูปแบบง่ายที่สุด โดยทำการกระตุ้นขดลวดทีละขดในเวลาหนึ่งไล่เรียงถัดกันไป เช่น เริ่มต้นที่ขดที่ 1, 2, 3, 4 แล้ววนกลับมาขดที่ 1 วนไปเรื่อยๆ หรือเริ่มที่ขดที่ 1 แล้วย้อนไปยังขดที่ 4, 3, 2 แล้วกลับมายังขดที่ 1 อีกครั้ง ซึ่งทำให้ทิศทางของการหมุนสวนกัน ในการกระตุ้นรูปแบบนี้จึงมีขดลวดเพียงขดเดียวในเวลาหนึ่งที่ถูกกระตุ้นเท่านั้น วงจรกระตุ้นแบบนี้มีราคาถูกและง่าย ขั้นตอนการทำงานต่างๆ แสดงดังในตารางที่ 1

เป็นการกระตุ้นซึ่งคล้ายกับแบบฟูลสเต็ปหนึ่งเฟส แต่การกระตุ้นแบบนี้จ่ายกำลังไฟฟ้าไปที่ขดลวด 2 ขดที่อยู่ใกล้กันในเวลาเดียวกัน และเรียงถัดกันไปเช่นเดียวกับแบบฟูลสเต็ป 1 เฟส ดังตัวอย่าง ขดลวดชุดแรกที่ถูกกระตุ้นจะเป็นขดที่ 1 และ 2 ตามด้วยการกระตุ้นขดที่ 2 และ 3 ต่อไปเป็นขดที่ 3 และ 4 ถัดไปเป็นขดที่ 4 และ 1 แล้วกลับมาที่ขดที่ 1 และ 2 วนไปตามลำดับเช่นนี้ หรือเริ่มที่ขด 1 และ 4 ตามด้วยขดที่ 4 และ 3 ถัดไปเป็นขดที่ 3 และ 2 ต่อไปเป็นขดที่ 2 และ 1 แล้ววนกลับมาที่ขดที่ 1 และ 4 ทิศทางการหมุนจะสวนทางกัน การกระตุ้นสเต็ปเปอร์มอเตอร์แบบนี้สามารถเพิ่มแรงบิดได้มากกว่าแบบฟูลสเต็ป 1 เฟส โรเตอร์จะเคลื่อนที่ด้วยแรงดึงอย่างเต็มแรงจาก 2 ขดลวดที่ถูกกระตุ้นพร้อมกัน และเคลื่อนที่ต่อไปด้วยแรงดึงจากอีก 2 ขดลวดถัดไป สำหรับข้อเสียคือการกระตุ้นแบบนี้ต้องใช้กำลังไฟฟ้ามากขึ้น ขั้นตอนการทำงานต่าง ๆ แสดงดังในตารางที่ 2

หรือถ้าต้องการควบคุมให้มีความละเอียดมากขึ้นอีกก็แบบนี้ครับ จะเห็นว่าเราสามารถคุมให้มอเตอร์หมุนได้ละเอียดขึ้นจาก 90 องศา เหลือ 45 องศา โดยที่ไม่ต้องปรับเปลี่ยนตัวฮาร์ดแวร์ใดๆ เป็นเพียงการเปลี่ยนวิธีการจ่ายกระแสเข้าขดลวดเท่านั้น
แต่เนื่องจาก Stepper motor ที่ใช้กันจริงๆ แบบรูปด้านล่าง มีซี่ และขดลวดมาก จึงทำให้สามารถควบคุมการหมุนได้ละเอียดมากๆ โดยการควบคุม 1 Cycle จะทำให้มอเตอร์หมุนไป 0.9 - 5 องศา แล้วแต่เทคนิคที่ใช้ในการควบคุมการหมุน
และเมื่อเปรียบเทียบกับภาพของจริงเป็นดังนี้
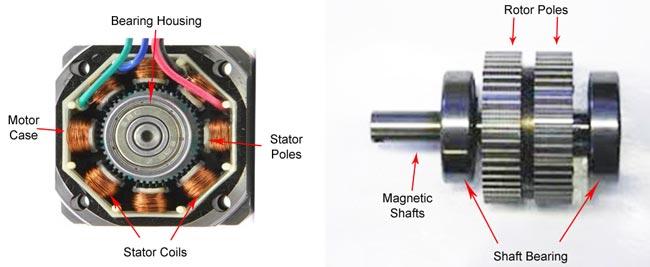
สเต็ปเปอร์มอเตอร์แบบไฮบริดมีแม่เหล็กถาวรที่มีลักษณะเป็นทรงกระบอกที่มีขั้วเหนือและใต้สลับกันตามแนวของทรงกระบอกทำหน้าที่เป็นส่วนของโรเตอร์ ขดลวดทั้ง 4 เฟสที่พันรอบแกนเหล็กทำหน้าที่เป็นสเตเตอร์ที่มีขั้วแม่เหล็กเปลี่ยนแปลงตามสัญญาณกระตุ้นที่ส่งเข้าไปในตัวมอเตอร์ ทำให้เกิดแรงดูดและแรงผลักกับโรเตอร์ทำให้แกนของมอเตอร์เกิดการหมุนและล็อกตำแหน่งได้ตามที่ผู้ใช้งานต้องการ

Ref.
1. http://www.inventor.in.th/home/%E0%B8%AA%E0%B9%80%E0%B8%95%E0%B9%87%E0%B8%9B%E0%B9%80%E0%B8%9B%E0%B8%AD%E0%B8%A3%E0%B9%8C%E0%B8%A1%E0%B8%AD%E0%B9%80%E0%B8%95%E0%B8%AD%E0%B8%A3%E0%B9%8C/(เข้าเว็บไซต์วันที่ 5/12/2560)
2. http://www.cncroom.com/forum/index.php?topic=29.0 (เข้าเว็บไซต์วันที่ 5/12/2560)
3.https://embed58.learninginventions.org/%E0%B8%AB%E0%B8%B1%E0%B8%A7%E0%B8%82%E0%B9%89%E0%B8%AD%E0%B8%99%E0%B8%B3%E0%B9%80%E0%B8%AA%E0%B8%99%E0%B8%AD/g1-2/ (เข้าเว็บไซต์วันที่ 5/12/2560)
4. https://www.arduitronics.com/article/25/arduino-and-motor-control-part-3-stepper-motor (เข้าเว็บไซต์วันที่ 5/12/2560)
5. https://www.engineersgarage.com/articles/stepper-motors (เข้าเว็บไซต์วันที่ 5/12/2560)



อีเมล : chawee2410@hotmail.com
TOP เลื่อนขึ้นบนสุด
