
Rotary Encoder Module (KY-040)





รายละเอียดสินค้า

ตัวอย่าง Code
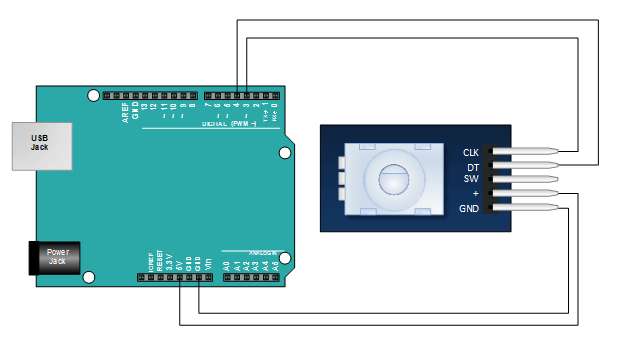
int pinA = 3; // Connected to CLK on KY-040 int pinB = 4; // Connected to DT on KY-040 int encoderPosCount = 0; int pinALast; int aVal; boolean bCW; void setup() { pinMode (pinA,INPUT); pinMode (pinB,INPUT); /* Read Pin A Whatever state it's in will reflect the last position */ pinALast = digitalRead(pinA); Serial.begin (9600); } void loop() { aVal = digitalRead(pinA); if (aVal != pinALast){ // Means the knob is rotating // if the knob is rotating, we need to determine direction // We do that by reading pin B. if (digitalRead(pinB) != aVal) { // Means pin A Changed first - We're Rotating Clockwise encoderPosCount ++; bCW = true; } else {// Otherwise B changed first and we're moving CCW bCW = false; encoderPosCount--; } Serial.print ("Rotated: "); if (bCW){ Serial.println ("clockwise"); }else{ Serial.println("counterclockwise"); } Serial.print("Encoder Position: "); Serial.println(encoderPosCount); } pinALast = aVal; }
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร

▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

mcu2robot
ร้าน MCU2ROBOT ขายบบอร์ด Arduino รุ่นต่างๆ เช่น arduino uno, arduino mega2560, arduino nano 3.0 ราคาถูก เป็นต้น และยังขายอุปกรณ์สำหรับทำหุ่นยนต์(robot)แบบต่างๆ เช่น หุ่นยนต์สำรวจ, โดรน, เครื่องบิน, แขนหุ่นยนต์, mini CNC, 3D Printer เป็นต้น โดยมีอุปกรณ์ตั้งแต่ เซ็นเซอร์สำหรับ arduino, พูลเล่ย์สายพาน, สายพาน, ล้อหุ่นยนต์, ลีดสกรู, ลูกปืน, optical axis, bearing, bread board, โมดูลต่างๆ, รีเลย์, GSM, GPS, มอเตอร์, power supply, สายไฟ, จอ LCD, resistor, capacitor ราคาถูก เป็นต้น และให้คำปรึกษาเกี่ยวกับการใช้งานอุปกรณ์ต่างๆอย่างละเอียด เราคัดสินค้าที่ดีที่สุดจากแหล่งที่ถูกที่สุดส่งตรงถึงบ้านคุณโดยที่ไม่ต้องเสียเวลาเดินทางและค่าเดินทาง โดยมีค่าจัดส่งราคาถูกและส่งสินค้าหลังจากมีการชำระเงินทันที www.mcu2robot.com FB: arduino2robot Line ID: arduino2robot
เบอร์โทร :
อีเมล : chawee2410@hotmail.com
อีเมล : chawee2410@hotmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม